ION
March Issue

Welcome to only the third issue of this newsletter in the whole year. We definitely still exist! Since last time, here’s what we’ve achieved:
A working high voltage power converter that we can draw power from
A working flight control system on the Mule, which stabilized it during glide test
Measurable amounts of thrust from our thruster test buck
An almost complete design of the Stallion, which is our full scale 5m airframe equipped for ionic wind flight
A static test, which combined the Stallion airframe, thrusters, and power converter, and generated thrust
This all seems like great news, and it is, but we have 2 months left to not only fly an ionic wind airplane, but to achieve a bigger goal. We’ve upped the stakes because we think we have a design that can fly for 1.8 kilometers, compared to our predecessor’s 60 meters. I’ll explain how, in the voltage multiplier section.
Our upcoming milestones are:
April 2 - Static test with converter & all 5 thrusters
April 9 - Static test with all subsystems combined
April 12 - First indoor flight test
May 1 - Outdoor flight test in the desert
Airframe
Mule
Let’s start with the Mule. Since we never really tested the Mule from last quarter, we conducted 3 major test sessions this quarter, retrofitting it an improved trailing edge and wingtips and adding control systems after the first session. At the end of the third test session we broke the aircraft, so it was retired and thanked for its service. It is now a legacy prototype that can be used for integration purposes.
Here are three highlights of the mule testing program.

First launch day - best flight with launcher

Third launch day - best glide ever using control systems

Third launch day - “Death of Mule”
Stallion
Onto the Stallion. Design of the Stallion has been much more involved than design of the Mule, since the Stallion needs to fly by ionic wind, carry the power converter, battery, and flight control payload, have the requisite safety mechanisms, pitch yaw and roll, and in general be a perfected aircraft. Of course, perfection is impossible. But it’s a pretty big jump from the mule.
Stallion (almost) final CAD model
Stallion Spar
One big change from the mule was changing from a balsa I-beam spar to a tubular carbon fiber spar, mainly for ease of construction. The I-beam spar is very strong when bent, so the wing of the mule is quite robust. However, it also required elaborate joinery and two part ribs that had to be glued on the front and back of the spar. It is also not very strong when twisted.
Meanwhile, a carbon fiber tube spar is trivial to construct, and ribs can just have holes in the middle. Carbon fiber can also bend quite a bit before breaking (see Death of Mule). However, designing a carbon fiber spar was pretty tricky. A tube is not the optimal shape for our airplane’s spar because most of the load is vertical, usually. But tubes are the cheapest. Many of these tubes were much too heavy, so a thin-walled tube was necessary. Because the wingspan is so high, the spar is bound to flex when loaded (even under its own weight). So the question was how much flex was allowable in fligth.
After a lot of analysis, and back and forth between a 0.5” and a 0.625” spar, we went with a 0.5” spar. That may have not even been the best decision because the extra flex might not have been worth the saved weight, but that’s what we have now.

Stallion - spar sizing analysis
Stallion Battery Placement
The Stallion also has a somewhat (?) strange battery placement. The batteries go in the wings rather than the fuselage. The lift force of the wing is far less balanced by weight at the wingtips than weight at the fuselage (since the fuselage is heavy), so the wings would tend to deflect upwards during flight. To counteract this, the batteries can be placed in the wings. The further away from the fuselage they are, the more they’ll bring down the wing. We found the optimal place to be near the ailerons, since further out would cause the wings to buckle slightly. Picture below is how batteries would be arranged in the wings, but they won’t be so close to the wingtips.

Stallion - battery placement
Stallion Fuselage
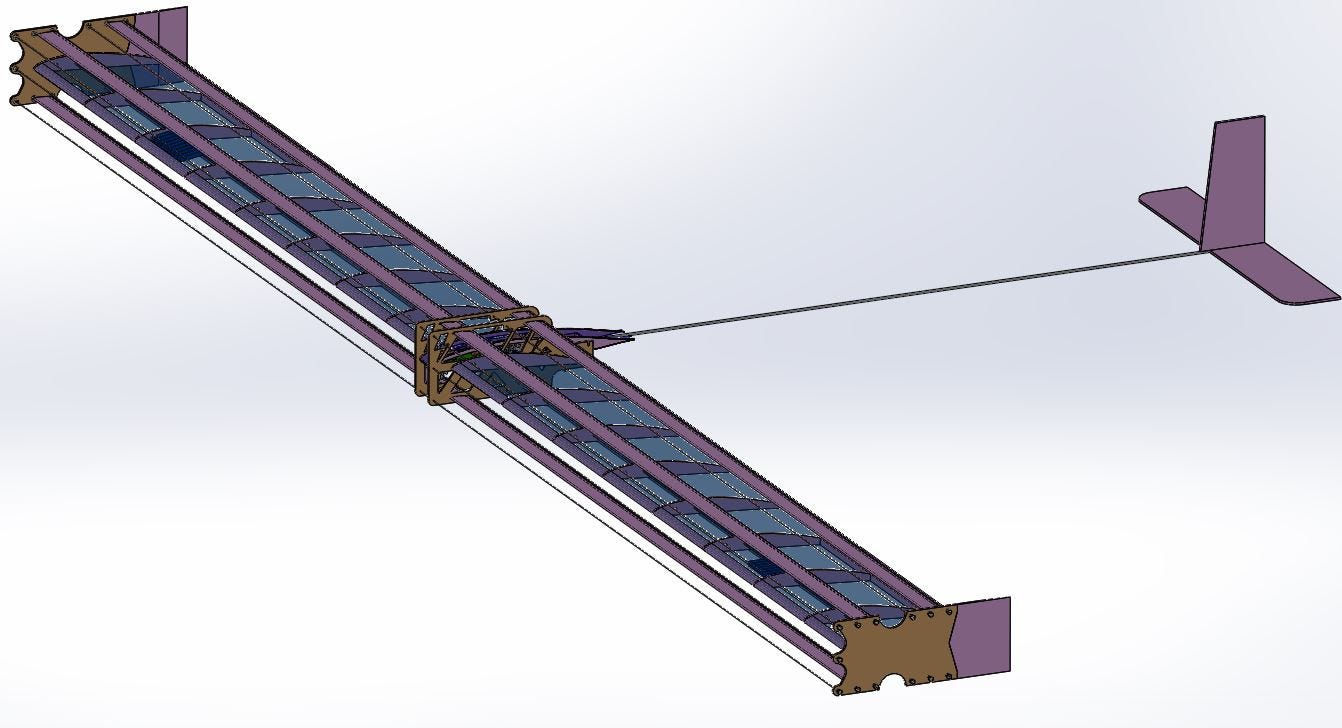
The fuselage of the Stallion was another central problem, like the spar. The fuselage performs many functions - carries the power converter, allows forced convection of the voltage multiplier heat sinks, provides a robust launch and landing surface and a central support for the thrusters. This is the fuselage design we came up with that fulfills all of those requirements. It consists of two parallel vertical plates with an airfoil shaped body in the middle.
The fuselage plates support the thrusters in the middle of the wingspan to minimize collector sagging. That way the collectors don’t need to be placed under nearly as much tension at the wingtips, as they would’ve needed for the same amount of sagging without fuselage plates. We also aimed to have the power converter be a single rigid body that can be slid in and out of the fuselage. This is achieved with a removable tail and having the power converter slide straight backwards. The picture below is chaotic but shows a single collector section through the front top slot.
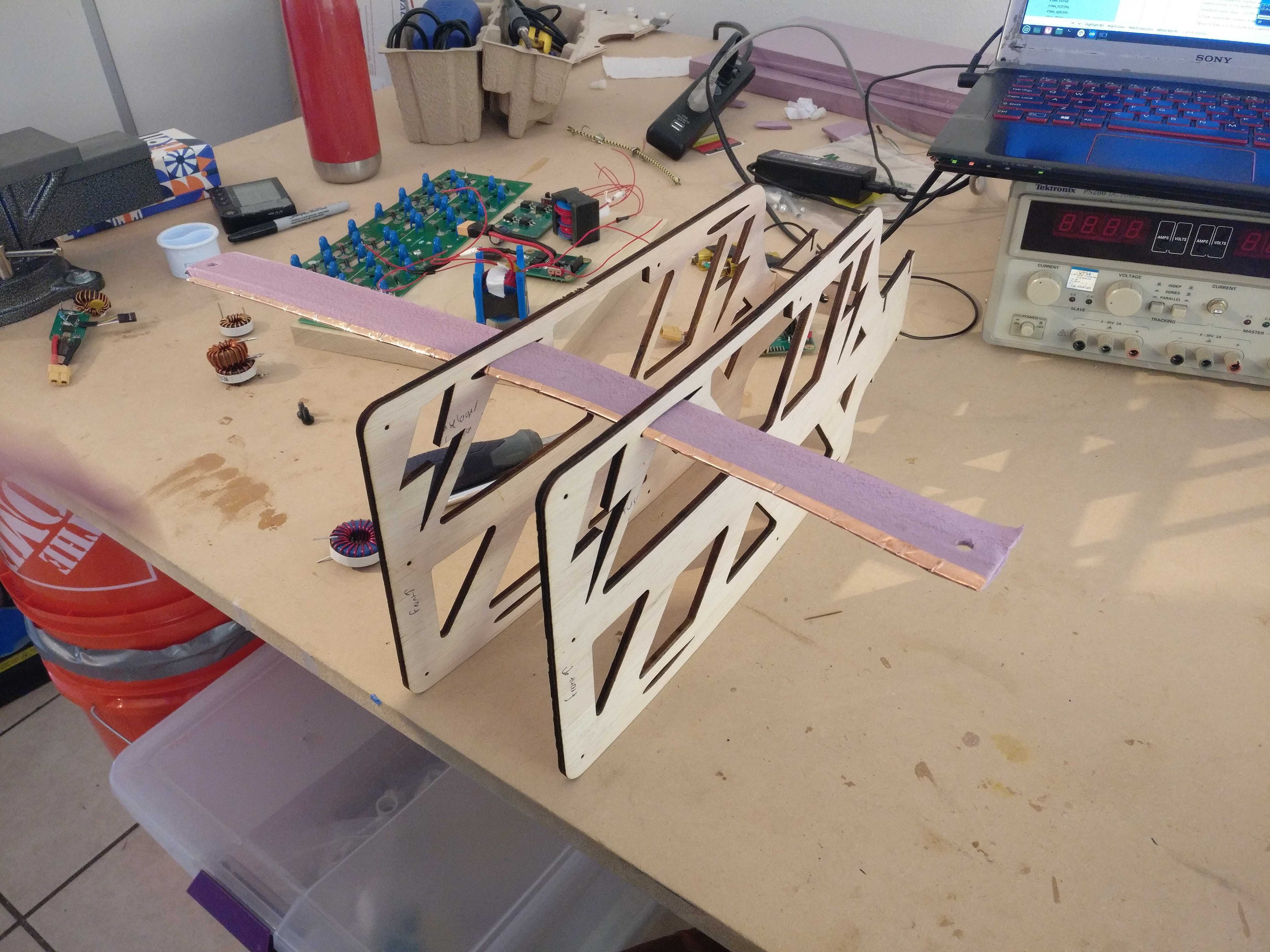
Stallion fuselage
Power Converter
The power converter also saw significant steps from the last issue (it had better). It drove the thrusters at 33kV for a split second, and been tested many times while loaded at 20kV. This (almost) final prototype was developed after significant revision of the H-bridge PCB, carefully design of the transformer bobbin, a lot of analysis of the resonant filter, and experimentation with building voltage multiplier heat sinks.
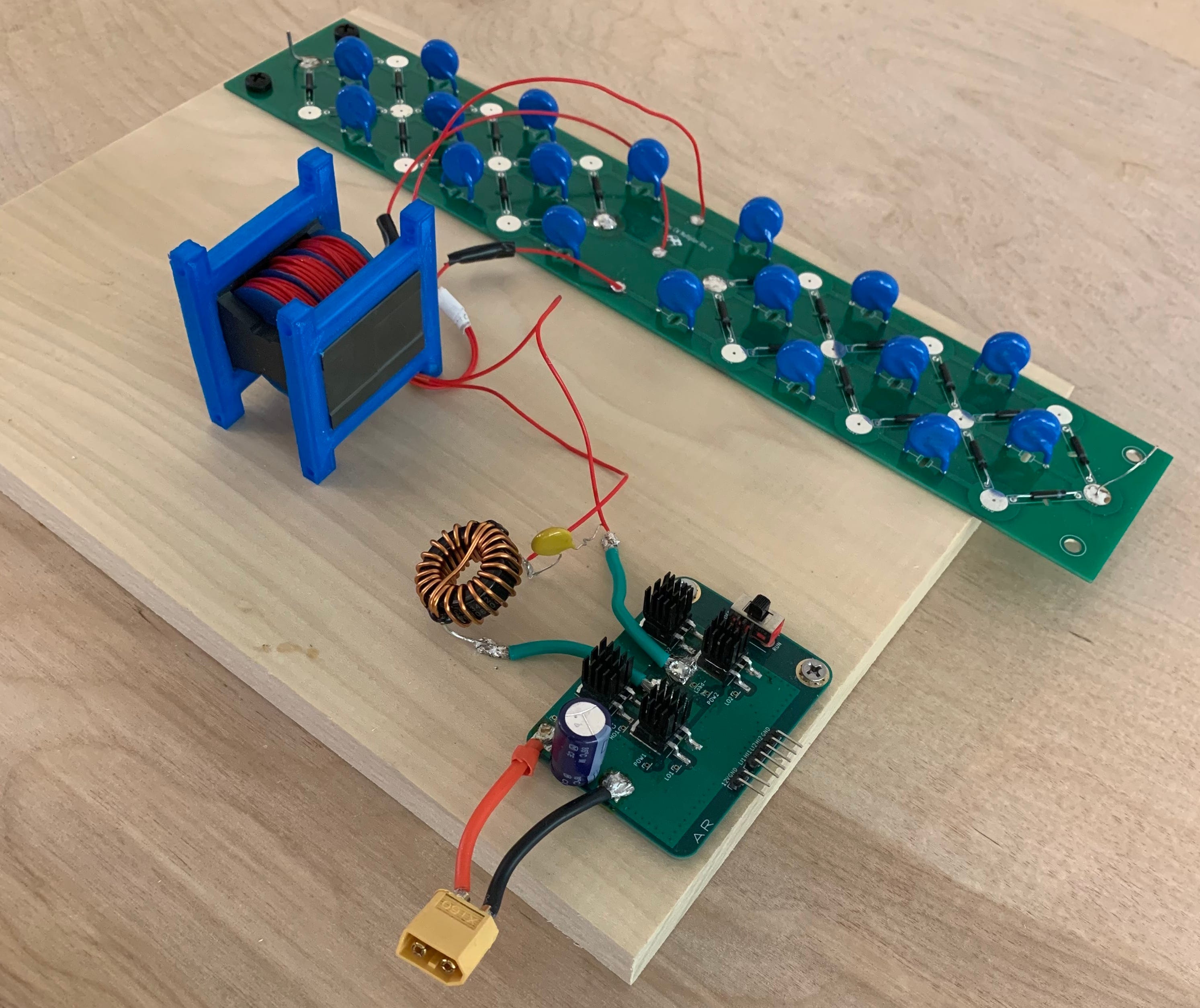
Almost final power converter prototype
H-bridge
The first major step this quarter was redesigning the H-bridge PCB. The first H-bridge could not switch high voltages at high frequencies because of its too high gate inductance and poor thermal management. The second revision has all the power traces on the same layer, an extremely short gate trace (basically just a via), proper spacing with high voltages taken to account, and broad copper layers for heat dissipation. It is shown below switching 100V at 150kHz, and this H-bridge design served the power converter well for many weeks of testing. We are also working on an H-bridge board based on an integrated gate drive chip.
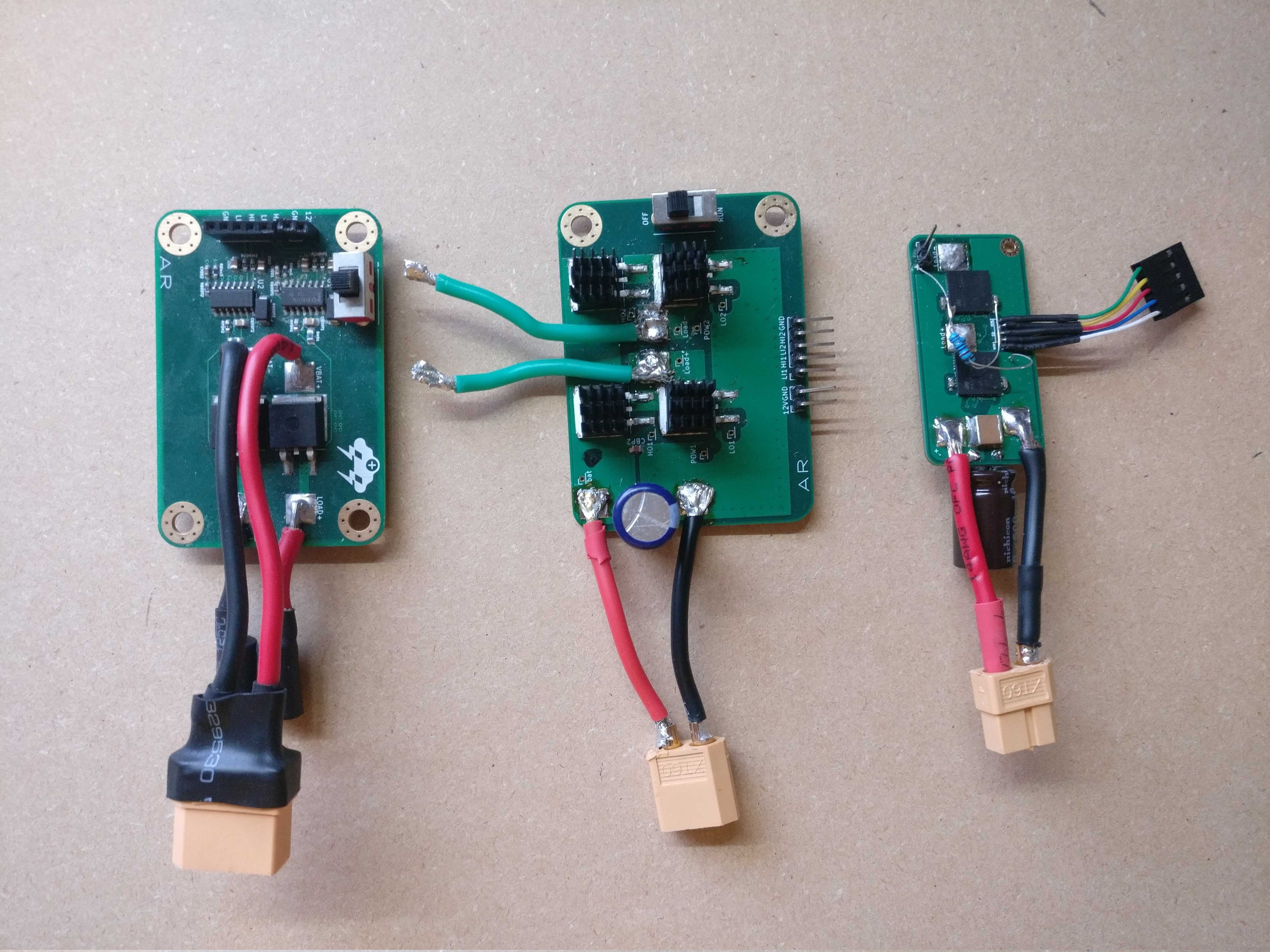
H-bridges from left to right - rev1 discrete, rev2 discrete (standard use), rev1 integrated
Transformer
The transformer was required to provide a gain of - as high as possible - using the same PQ40/40 ferrite core, while also adequately insulating all its windings. To do this we designed a custom bobbin that sectioned and structured the transformer windings. It took us a bunch of prototyping to perfect the construction technique, for which we made a mandrel and spacers that enabled very tight windings without everything exploding all over the place.

From left to right - separators being crushed by winding, mandrel for proper gluing alignment of bobbin separators, final bobbin that fits into ferrite core pair
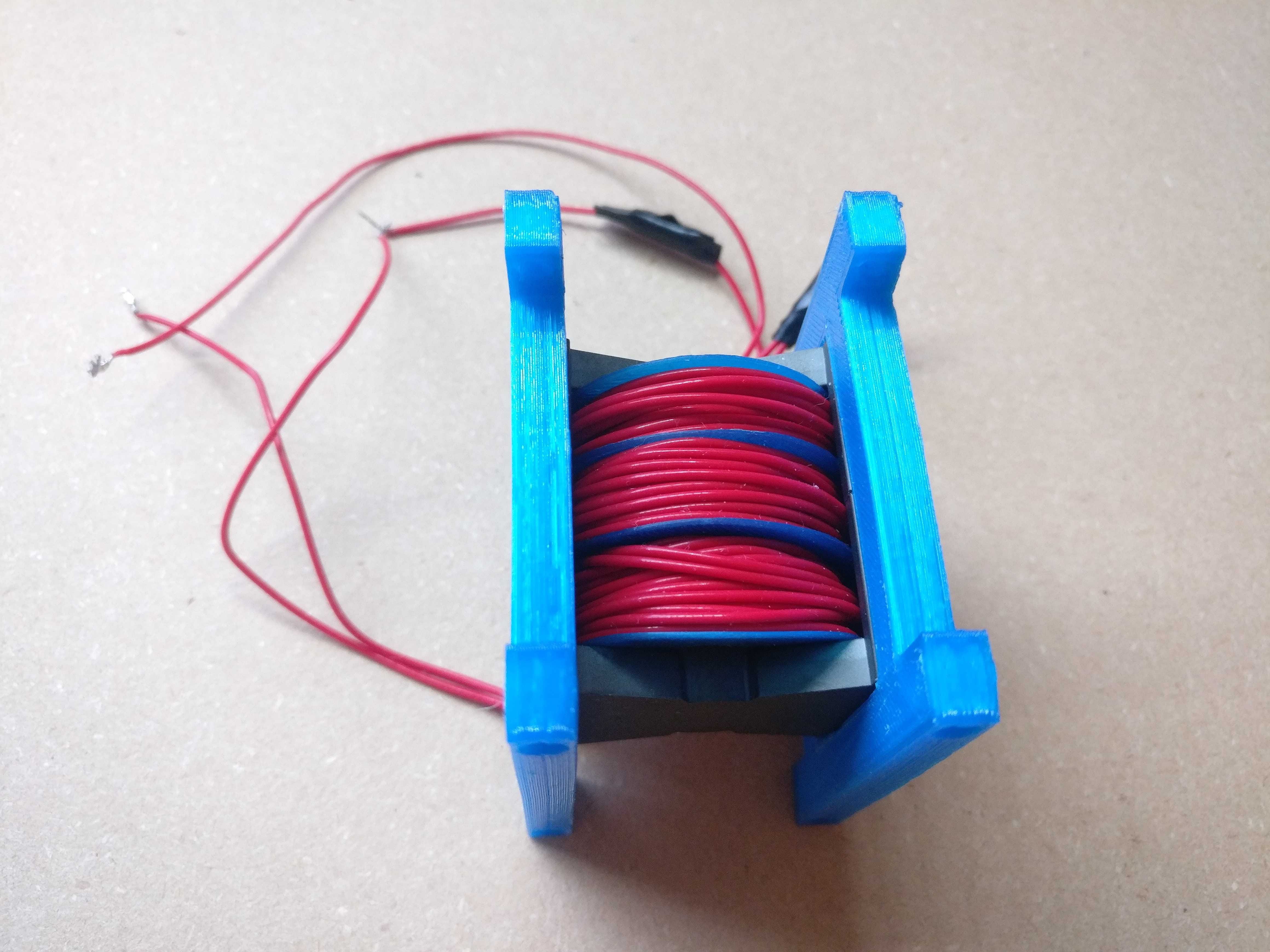
PHAT 16x transformer! 3d printed brackets to keep the core together, since tape didn’t cut it
Multiplier
The voltage multiplier is still mostly in progress. The multiplier, if operated at high frequencies, can generate a lot of heat. This requires a thermal management system that sinks heat away from the diodes, which undergo switching losses. We’ve had a slick voltage multiplier PCB design for quite a while, but building a multiplier that can take the heat has been quite challenging. The heat sinks are placed at diode terminals because the metal terminals carry heat out of the diodes more efficiently than the plastic package. But a single diode’s terminals can have a potential difference of up to 8kV, so the heat sinks can’t have sharp edges. So the default design is a cylindrical heat sink with round caps.
The MIT converter used copper tubes for heat sinking, but we analyzed the difference between aluminum and copper and found that aluminum would perform almost as well as copper, but is 3 times lighter. On the flip side, soldering to aluminum is an absolute pain.
Additionally, we designed our fuselage with an “air scoop” structure to enable air to flow over these heat sinks. Forced convection combined with the use of aluminum significantly reduces the weight of the heat sinks from 90g to about 25g (almost 4x)! But we still need to put pen to paper and build this multiplier design.
Multipliers

Thermal modeling of voltage multiplier
The importance of this design: if we can run the voltage multiplier for multiple minutes without overheating, we can tap the full energy of our battery pack. Assuming straight steady state flight at 5m/s and 3A of current draw, our 0.3Ah battery pack should enable a flight time of 0.1hrs, or 6 minutes. Flying 5m/s for 6 minutes is 1800m, or 1.8km! That would be the longest an ionic wind airplane has ever flown.
Thruster
We finished our thruster test buck! That mainly consisted of building a discharge stick and a control board for our HV power supply. And we tested in the lab, and generated thrust! We got something like 2g from 35cm of thruster, which is lower than expected, but reasonable.

Thruster test buck
Emitters
The main challenge with emitters is construction and robustness. At its core an emitter is just a thin metal wire brought to a high voltage. But the thin metal wire must be straight, without kinks or bumps, and remain straight while the wing flexes.
The first change we made was switching to stainless steel wire from copper. Steel is much stronger than copper but should generate similar levels of thrust. This means the wire will stretch a lot more before breaking, which is a good quality since we don’t want emitters snapping. The second change was tensioning the wire while still allowing play. The best method we found to do this was with rubber bands! All we do is tie the wire around a rubber band, and loop the rubber band around a nub or notch, and we have a very robust emitter.

I strum the almost invisible Steel emitter wire, rubber band holding tension at all angles
Collectors
For a long time, we used aluminum foil as our collector material. Aluminum, as noted in the multiplier section, is annoying and difficult to solder to. So we started using copper foil tape as our collectors. That way the collectors can be made just by taping the copper foil onto the leading edge of foam sections. However, it is quite heavy, weighing in at 3.2g/m (80g for all collectors). So we are planning to move to aluminum tape, which would perform the same function but be lighter. It appears that crimping/pressing to thruster electrodes is more effective and robust than soldering anyway.
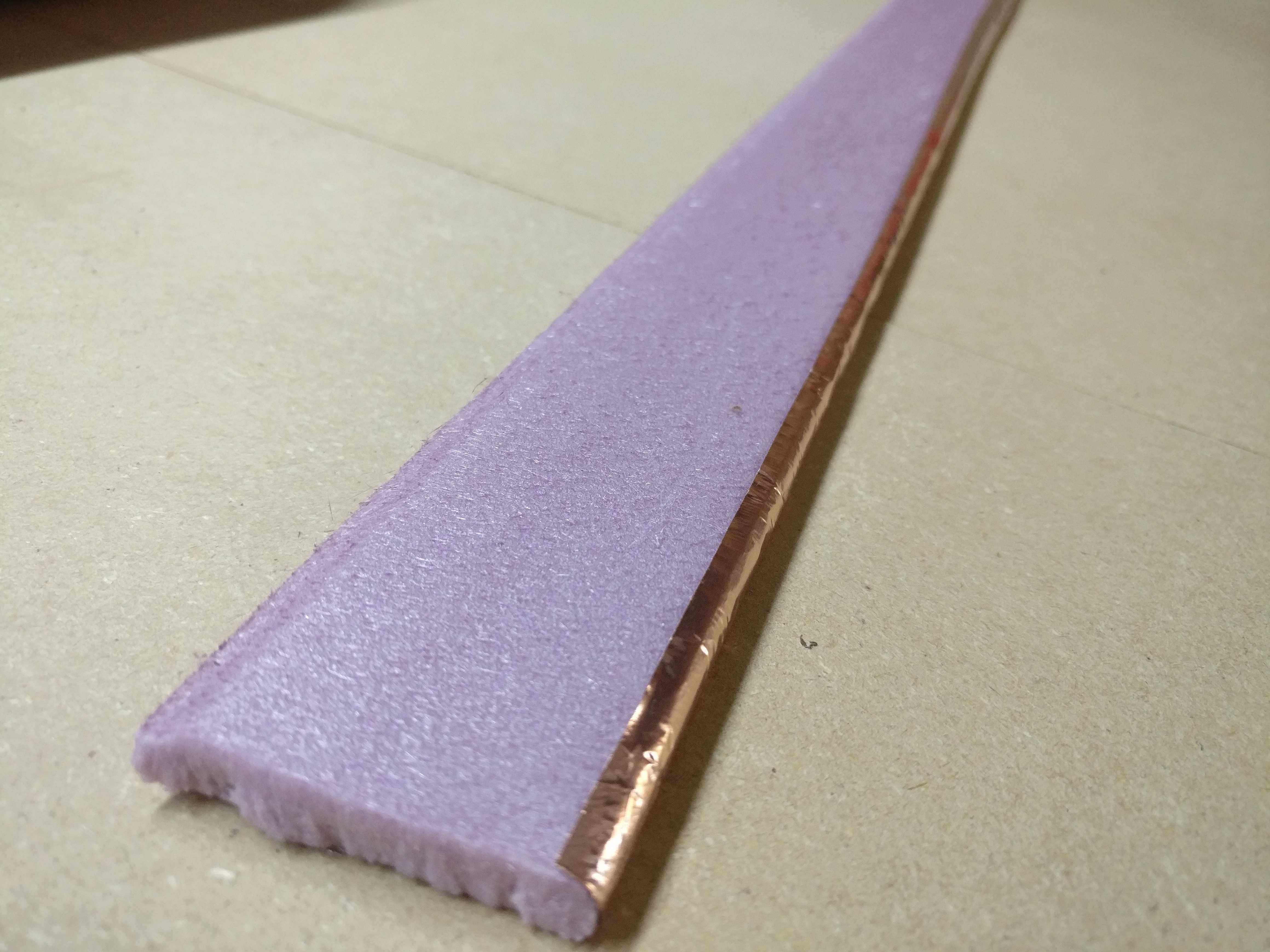
Copper foil tape collectors
Batteries
The battery selection resulted in a move away from the batteries used in the MIT aircraft, to batteries with twice the capacity. This was done for three reasons - more range, more weight to weigh down the wings, and ease of charging. The E-flight 150mAh batteries would’ve required us to solder together a custom battery pack, very difficult considering how small the tabs on those batteries are. In contrast, the batteries we selected were 3S (3 cells in series) with XT30 connectors, for which we just needed to make a harness.
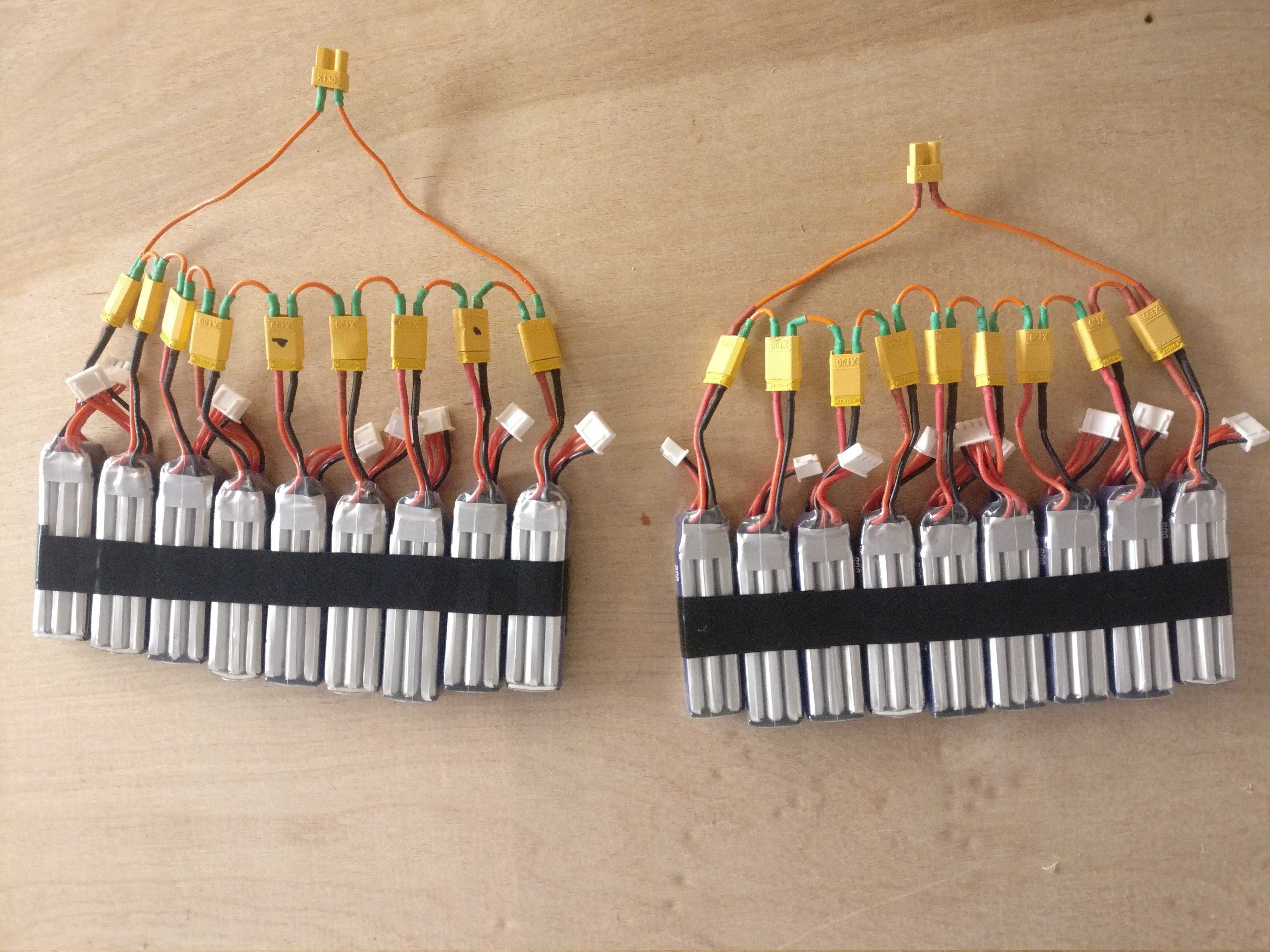
Battery pack
Static Test
Static testing is the important intermediate step between subsystem testing and flight testing. It allows us to test the airframe and all the other subsystems integrated together, without having to actually launch the airplane. It can be anything from just a single thruster on the airframe and the HV power supply, using the power converter, using the batteries, and eventually testing a complete aircraft. We plan to have static tested at least 3 times before launching the aircraft, ending up with an aircraft that we are pretty sure will fly.
Setting up the static test
Conclusions
A lot of design & development happened in the last 3 months, and there is a lot of integration & testing to do in the 7 weeks we have left. Thank you all readers, for your time & interest. We won’t stop!